[:en]
Microprocesseur, microcontrôleur, PLC, DSP
Microprocesseur, microcontrôleur, PLC, DSP
I ) SD Micro card
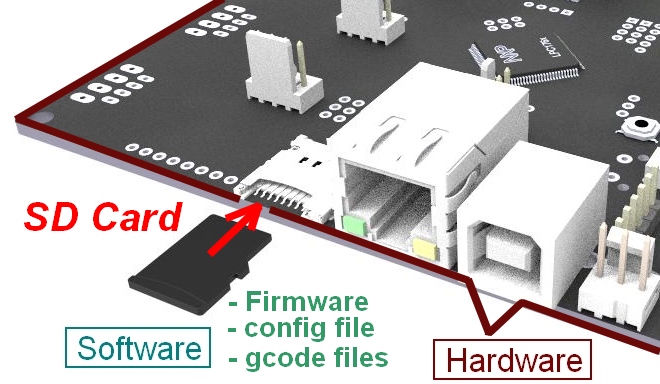
We can separate the smoothieboard controler in
Software part :
Firmware —-> can be update
config file —-> setting of smoothieboard
Gcode files —> machining path
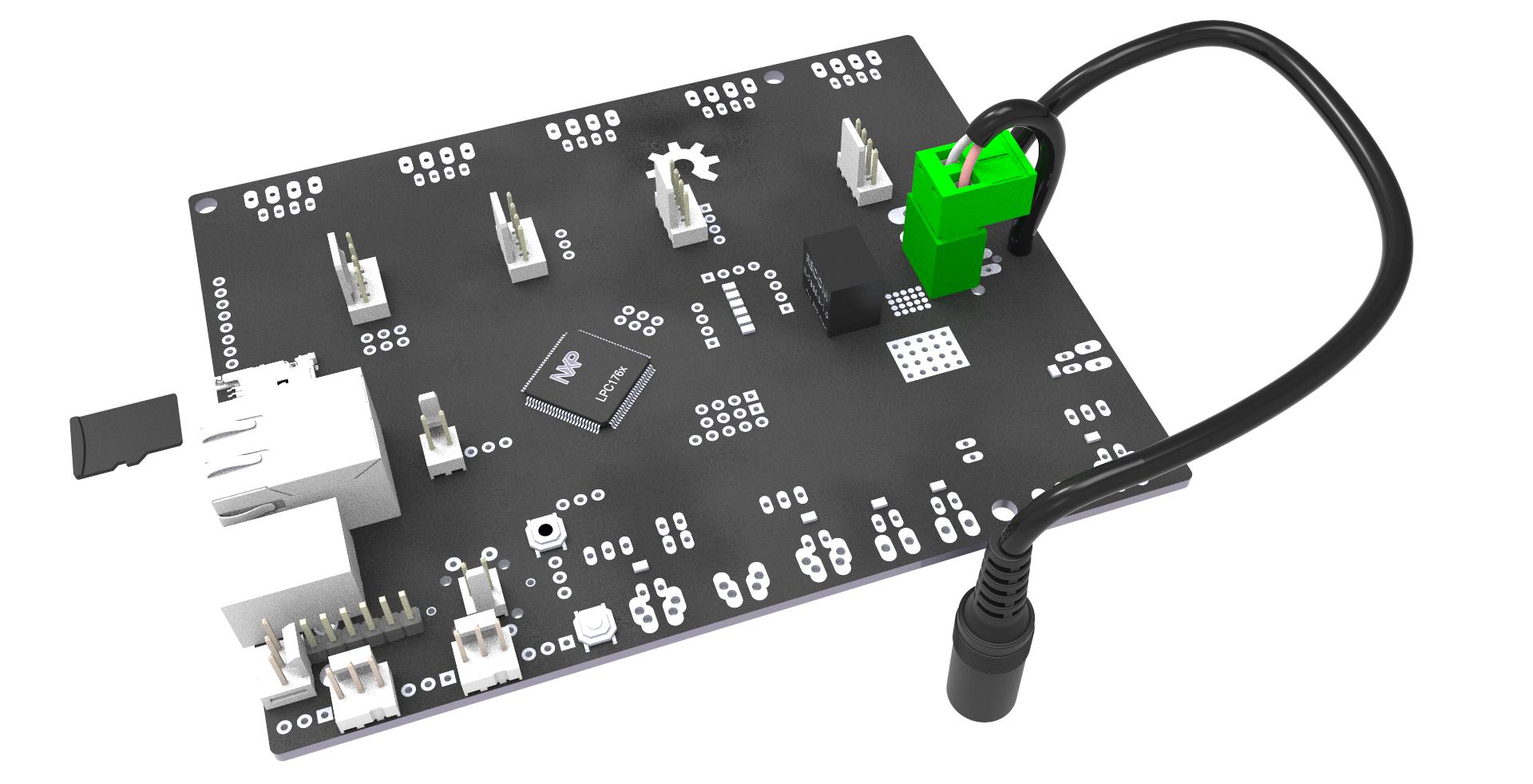
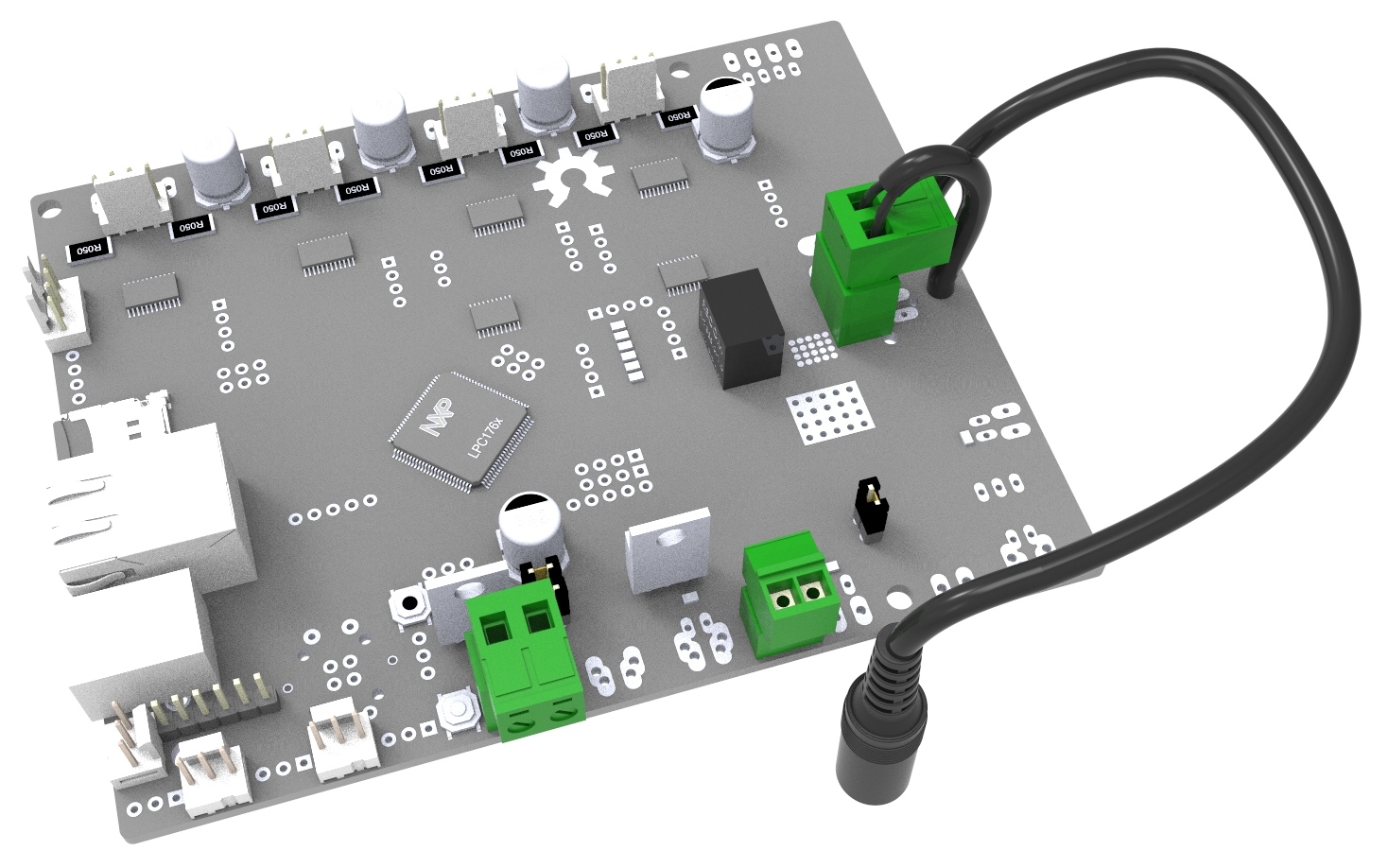
Hardware électronic board with :
32-bit Cortex-M3 LPC1769 processor
with 512kB flash and 64kB RAM
Ethernet and USB connections
Various inputs and outputs for extensibility
Without Sd-card the smoothieboard can’t works
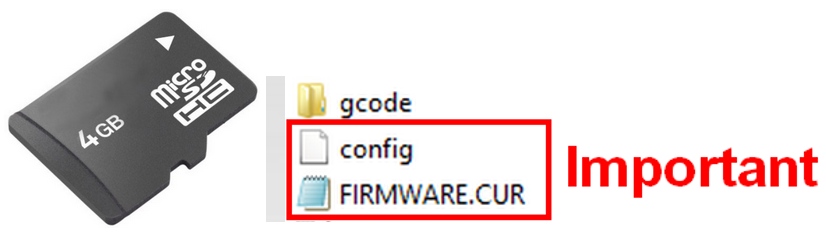 If the smoothieboard can’t read the two file more important
If the smoothieboard can’t read the two file more important
config and Firmware.cur, the smoothieboard don’t start.
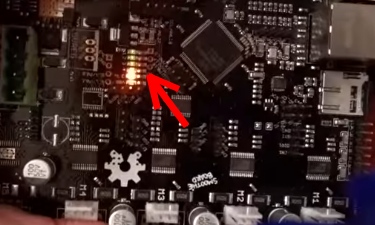
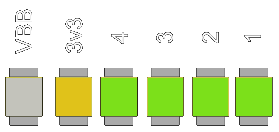
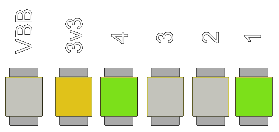
If have problem with sd-card or firmware inside sd-card.
Can see with color of led.
Don’t mix smoothieboard firmware and config with gcode file.
Create special folder ‘gcode » for exemple to put machining file inside.
If you don’t can do mistake and delete sometimes important file.
Can have two more file, depend of options you choice.
-
config-override : – Created when the g-code M500 is played.
-
on_boot.gcode : – Played on startup of smoothieboard. Can be used to initialize the smoothie driven device.
Overway is to copy sd-card to other sd-card (like copy sd-card for raspberry pi)
|
All is normal
|
The Led 2 and 3 blink at this speed The Les 4 and 1 stay on |
|
Sd-Card problem
|
The Led 4 stay off |
|
Firmware crash
|
All green led stay on or Led 3 and 2 stay off |
For overcome problem see Troubleshooting section of smoothieboard documentation http://smoothieware.org/troubleshooting#troubleshooting-a-problem-with-your-smoothieboard
The values in the configuration file will be overridden for those configuration options.
There is a set of M-codes (M50x) documented below that allow you to save all the current settings that have Mxxx commands to set them. This is particularly convenient for parameters that require tuning, as you can use a command to modify them without having to open the file and reset the board.
As these settings can be temporarily overridden with Mxxx commands there is a way to save these settings. Once saved they are reloaded on reset or boot overriding the settings in the config file. If you then edit the config file, make sure the setting you are editing is not being overridden by the override file (M503 will tell you if there is an active override file). This can sometimes explain why editing the config file appears to have no effect.
| M-code | Description | Example | ||||
| M500 | Save settings to an override file | |||||
| M501 | load config-override file optionally specifying the extension | M501 – loads config+override, M501 test1 – loads config+override.test1 | ||||
| M502 | Delete the override file, reverting to config settings at next reset | |||||
| M503 | Display overridden settings if any | |||||
| M504 | Save the settings to an override file with specified extension | M504 blue-pla |
Crashing
Do not issue M500 or M504 when gcode is read by machine, or the machine could crash or the SD card become corrupted.
Do not
Edit the config-override file yourself, only use the commands to edit the values.
0 commentaires
Microprocesseur, microcontrôleur, PLC, DSP
Dans les descriptions des différentes électroniques de commande d’une machine CNC, le vocabulaire peut être abscon, surtout s’il n’est pas utilisé pour des raisons techniques mais marketing.
I ) Différence entre microprocesseur et microcontrôleur
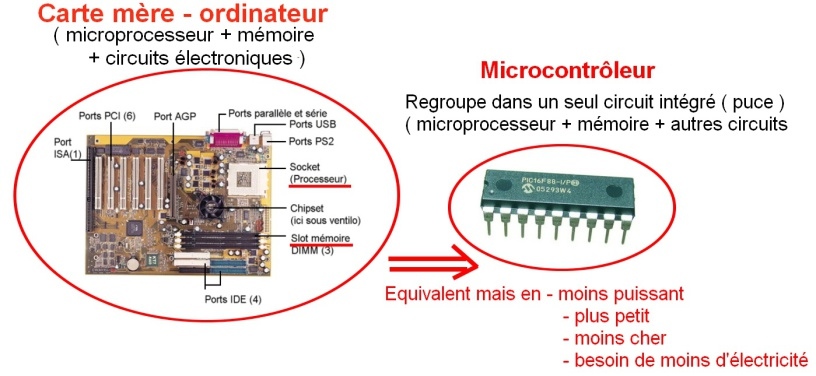
Un microcontrôleur est un mini-système, constitué de l’ensemble microprocesseur avec RAM, ROM, EEPROM, convertisseurs CAN/CNA et interfaces d’entrées/sorties séries/parallèles, intégrés dans une même structure (une même puce, un même circuit).
Du fait de la richesse de sa constitution, un microcontrôleur est bien un mini système et peut être envisagé comme une solution générale à une majorité d’applications analogiques, numériques ou mixtes, qui ne nécessite pas une vitesse extrême, pour laquelle il est préférable d’utiliser des circuits câblés, ou à la rigueur, des circuits reconfigurables FPGA
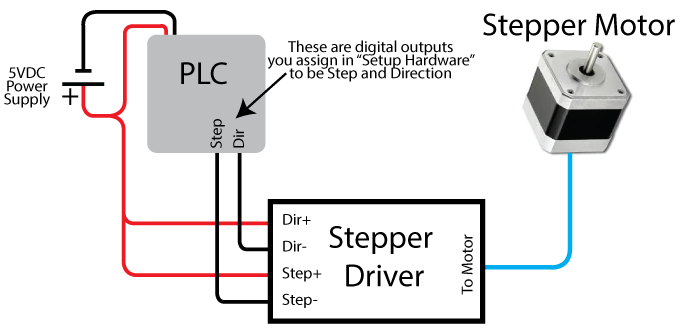
II ) Pilotage d’un driver de moteur pas à pas avec un PLC
Un contrôleur logique programmable (de l’anglais : Programmable Logic Controller (PLC)) appelé aussi automate programmable est un composant qui est programmé et utilisé pour la commande ou la régulation d’une machine ou d’une installation.
Un PLC est pourvu d’entrées, de sorties, d’un système d’exploitation (firmware) et d’une interface par laquelle peut être chargé un programme d’application (logiciel d’exploitation). Le programme d’application définit la façon dont les sorties doivent être commutées en fonction des entrées. Un langage graphique très utilisé pour la programmation des PLC est le langage LADDER.
Le système d’exploitation (firmware) fait en sorte que le programme d’application ait toujours à sa disposition l’état actuel des capteurs. Sur la base de ces informations, le programme d’application peut commuter les sorties de sorte que la machine ou l’installation fonctionne comme prévu.
La liaison entre le PLC et la machine est réalisée par des capteurs et des actionneurs. Les capteurs sont branchés aux entrées du PLC et communiquent à ce dernier ce qui se passe dans la machine.
Certains utilisent un PLC à la place d’un microcontrôleur pour gérer les pilotes d’un moteur pas à pas, afin de faire de l’automation.
Je pense cependant que le PLC est moins rapide et performant qu’un microcontrôleur.
III ) Qu’est ce qu’un circuit DSP
Un DSP (de l’anglais « Digital Signal Processor », qu’on pourrait traduire par « processeur de signal numérique » ou « traitement numérique de signal ») est un microprocesseur d’un type particulier optimisé pour exécuter des applications de traitement numérique du signal le plus rapidement possible.
Comme un microprocesseur classique, un DSP est mis en œuvre en lui associant de la mémoire (RAM, ROM) et des périphériques. Un DSP typique a plutôt vocation à servir dans des systèmes de traitements autonomes. Il se présente donc généralement sous la forme d’un microcontrôleur intégrant, selon les marques et les gammes des constructeurs, de la mémoire, des timers, des ports série synchrones rapides, des contrôleurs DMA, des ports d’E/S divers.
Applications des circuits DSP : les applications sont de plus en plus nombreuses
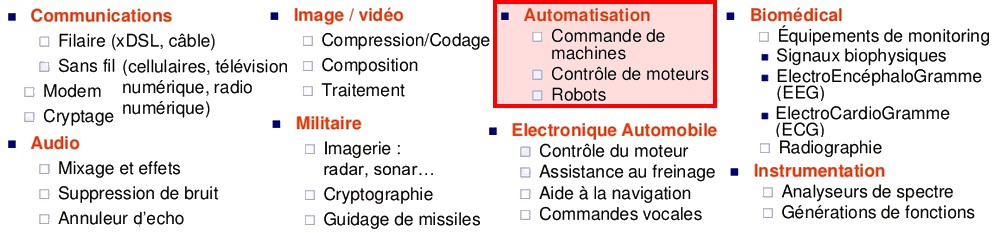
Les circuits DSP peuvent être utilisés pour la commande de machines, le contrôle de moteurs
Par exemple certains drivers de commande de moteurs pas à pas numériques, possèdent un circuit DSP
En effet le signal numérique qui va envoyer les impulsions vers les bobines du moteur peut être retravaillé en temps réel afin de diminuer les vibrations, les phénomènes de résonance et les pertes de puissance.

Par contre le fait d’appeler des télécommandes de fraiseuse CNC des systèmes DSP me semble être plus du marketing
Exemple avec le contrôleur 3 axe DSP A1 RichAUto
Ce contrôleur DSP est réalisé par l’entreprise Beijing RichAuto ( Ruizhitianhang en Chinois ) http://www.richauto.com.cn/en/

Plus d’informations sur le contrôleur DSP Richauto A11
0 commentaires