Motorisation des axes avec des moteur pas à pas
Le moteur pas à pas fut inventé en 1936 par Marius Lavet, un ingénieur français des Arts et Métiers, pour l’industrie horlogère (source Wikipédia)
I ) Fonctionnement
Le moteur pas-à-pas possède un rotor avec un aimant permanent et un stator avec deux bobines A et B, le courant traverse ces bobines dans un sens puis ensuite dans l’autre inversant ainsi les polarités.
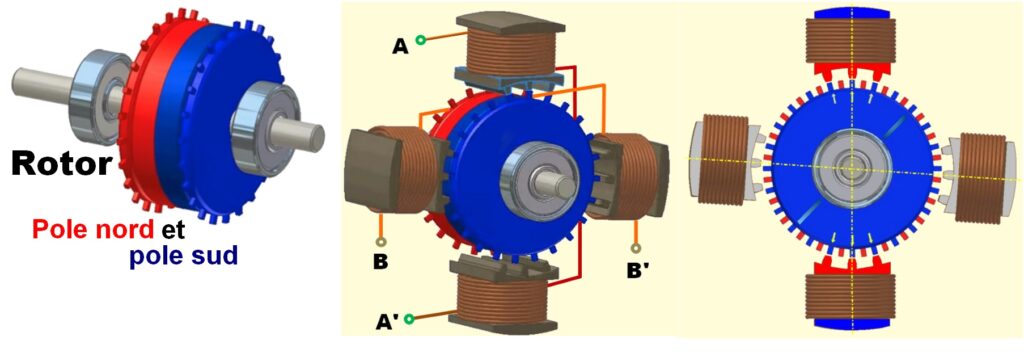
L’extérieur du rotor ainsi que les noyaux des bobines du stator ont des dents.
La construction est réalisée pour que lorsque les dents de la bobine A aimantent les dents du pôle opposé du rotor, les dents de la bobine B ne soient en face d’aucune dent du rotor.
Ainsi lorsque c’est la bobine B qui est alimentée a son tour, le rotor fait une légère rotation, l’aimantation alignant ces autres dents.
Les possibilités de déplacement angulaire
sont nombreuses, selon le sens de déplacement du courant dans les bobines,
on attire différentes dents du rotor (dents rouges ou bleus dans cette animation)
Il y a beaucoup de types de moteurs, pas à pas.
Ceux utilisés par les machines CNC sont précisément des moteurs pas-à-pas hybrides bipolaires.
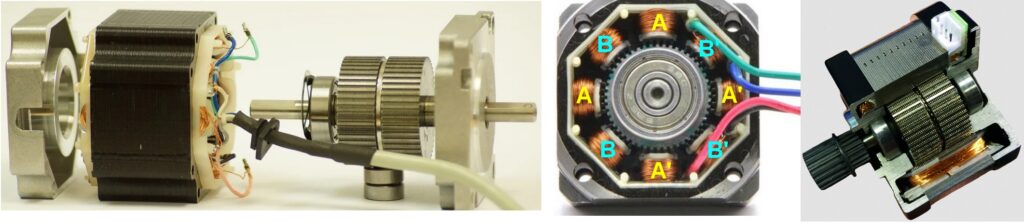
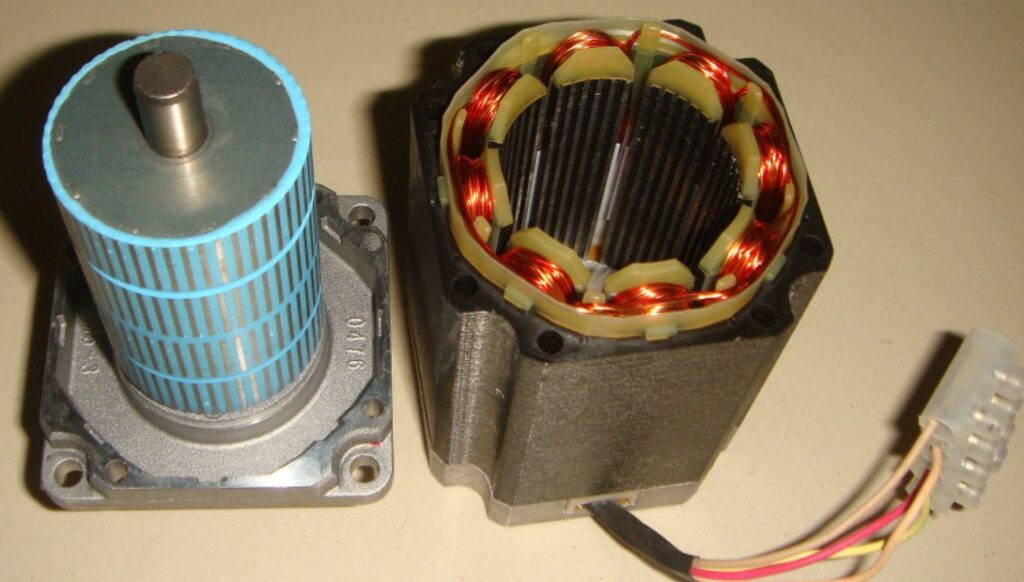
Si vous démontez un moteur pas à pas vous verrez 8 enroulements dans le stator, même s’il y a bien que deux bobines en deux parties réparties sur tout le pourtour.
Il y a d’ailleurs 4 fils correspondant aux 2 extrémités d’une bobine plus 2 extrémités de l’autre bobine.
Remarques : ne démontez pas des moteurs pas-à-pas que vous comptez utiliser, après démontage, la qualité des aimants permanents à l’intérieur est diminuée et le moteur sera moins performant après remontage.
II ) Normes et caractéristiques
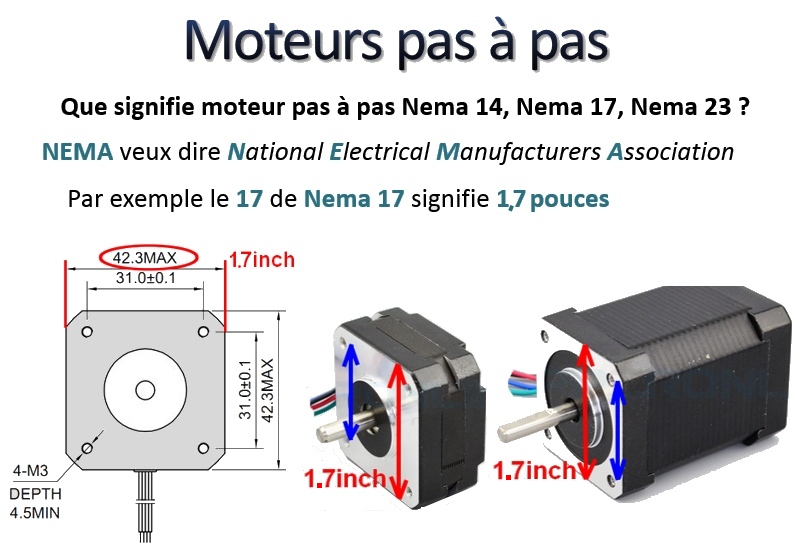
La norme Nema correspond à des dimensions utiles pour la fixation du moteur dans une machine.
Ce qui permet l’interopérabilité puisqu’un moteur Nema 23 d’un fabricant peut être remplacé par un autre moteur nema 23 de mêmes caractéristiques d’un autre fabricant.
Contrairement à ce que beaucoup pensent, Nema n’indique rien sur la puissance du moteur, il est vrai que plus un moteur est gros plus il y a de chance qu’il soit puissant, mais la taille c’est aussi la longueur du moteur. Et un moteur Nema 17 long peut être plus puissant qu’un Nema 23 très court.
Les moteurs pas-à-pas plus longs ont des bobines de stators plus importantes, les rotors ont le double d’aimants permanents 4 au lieu de 2, ce qui augmente la puissance.
Ce qui compte dans un moteur pas à pas c’est le couple en N. m, c’est indiqué sur les fiches techniques du fabricant.
Le couple disponible peut être différent selon la vitesse de rotation du moteur et l’intensité du courant envoyé dans ses bobines.
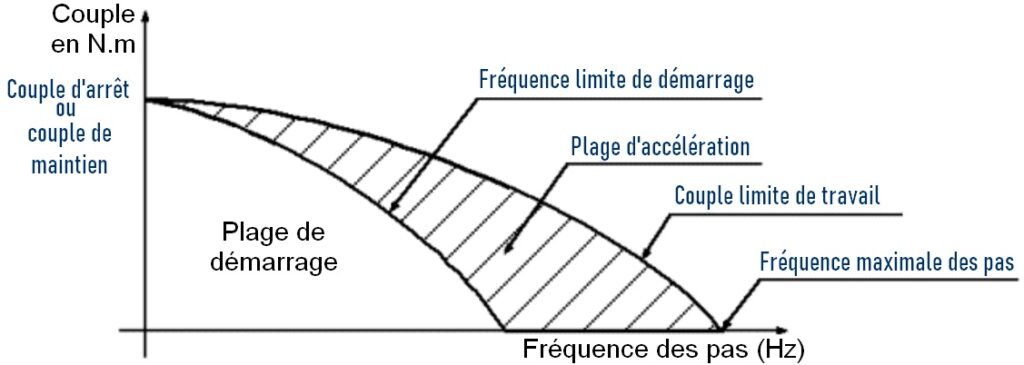
Le couple indiqué par le fabricant est celui du « couple d’arrêts », le couple maxi à partir du moment où on fait sauter un pas le moteur à l’arrêt.
Le couple ensuite diminue en fonction de la vitesse, un moteur pas à pas est plus performant à faible vitesse qu’à vitesse importante.
Le couple possible sans perte de pas est plus faible au moment du démarrage qu’en vitesse de travail, c’est pour cela que pour le pilotage des moteurs pas à pas il faut paramétrer des phases d’accélération et décélérations.
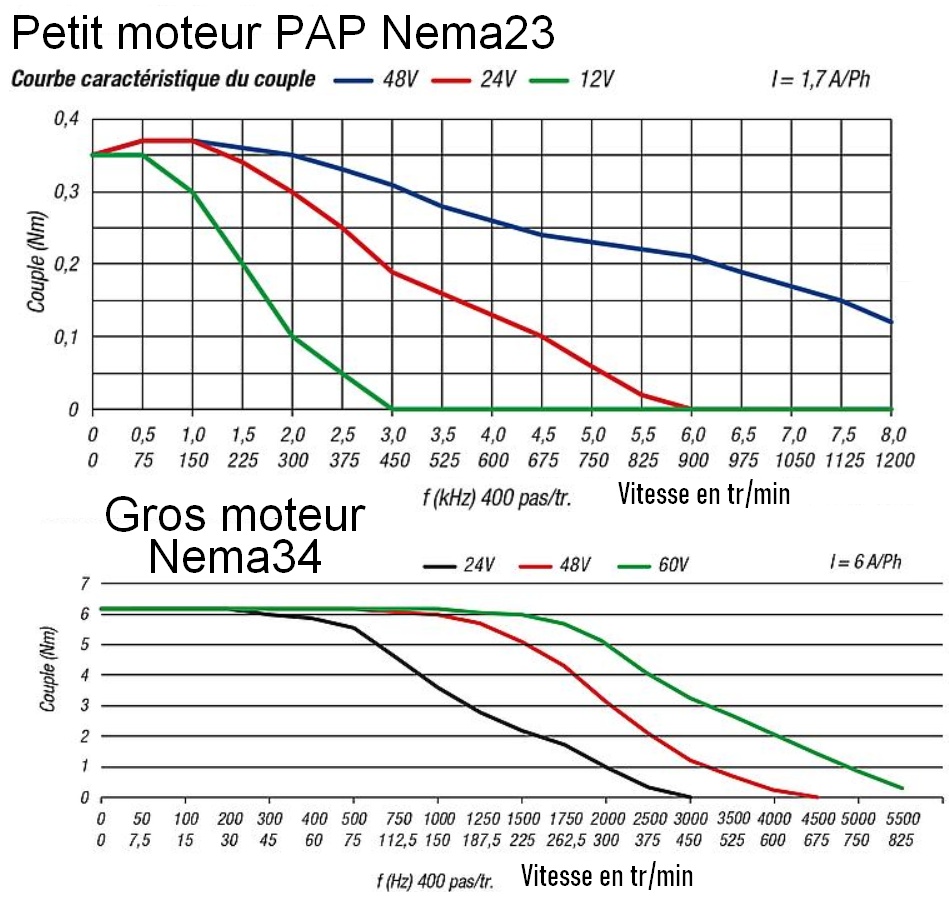
Il est évident que plus un moteur est gros, plus ses bobinages pourront supporter une intensité importante et plus il pourra maintenir un couple important à haute vitesse.
Mais pour un même moteur plus on l’alimente avec un voltage important, plus il gardera du couple à grande vitesse, il est également évident que les moteurs de plus grande taille acceptent des voltages plus élevés que les petits. Dans les données constructeur il y a une plage pour alimenter les moteurs pas à pas, par exemple 12V à 50V, choisissez toujours la partie haute de la plage par exemple une alimentation électrique de 36V au lieu de 24V ou mieux 48 V.
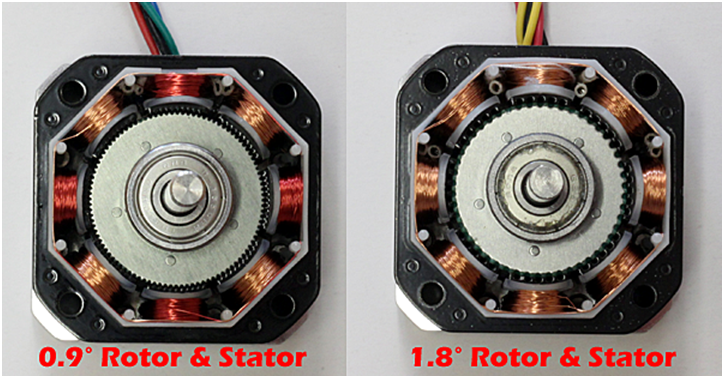
Le moteur pas-à-pas bipolaire classique permet de faire 200 pas en un tour c’est-à-dire à chaque fois des déplacements angulaires de 1,8 deg
On peut trouver également des moteurs PAP de 400 pas / tours avec des déplacements angulaires de 0,9 deg
III ) Branchements
Les pilotes de moteurs pas-à-pas ont un bornier où doivent être branchés les 4 fils du moteur.
Cet emplacement est noté A+ A – (une bobine du moteur) et B+ B – (l’autre bobine du moteur)
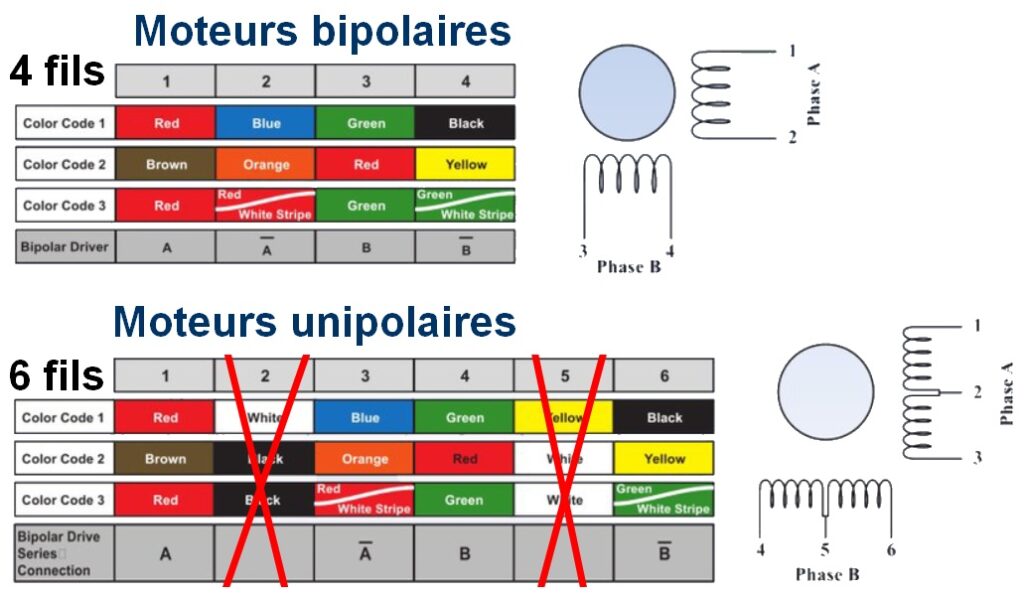
Souvent les moteurs bipolaires ont comme couleur de fils rouge, bleu, vert, noir correspondant à A+ A — B+ B-
Sinon cela peut être marron, orange, rouge et jaune pour A+ A — B+ B —
Mais vous pouvez très bien tomber sur un code de couleur de fils plus exotique, il donc nécessaire de connaître la méthode ci-dessous qui consiste a tester les bobines avec un testeur de continuité.
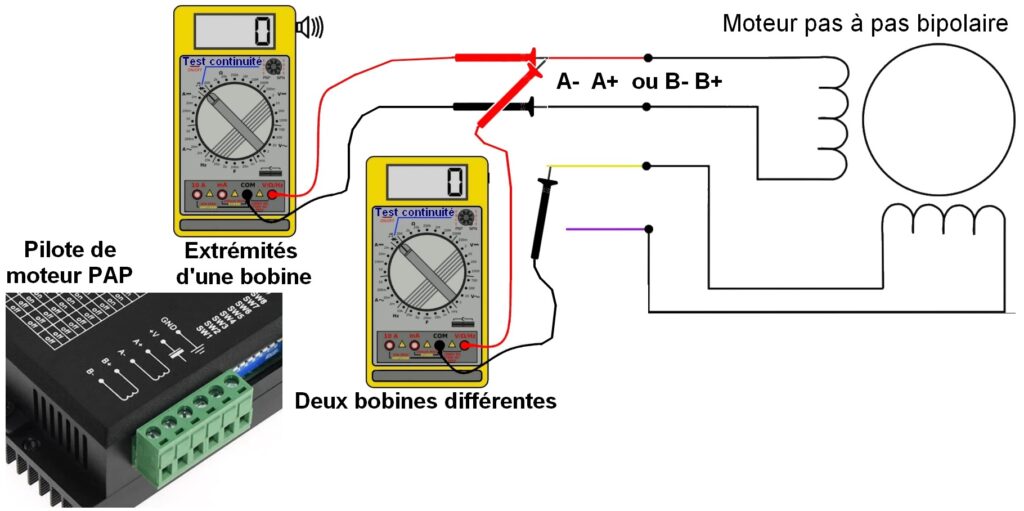
Pour brancher correctement les fils, il faut faire un test de continuité entre ceux-ci pour voir s’ils appartiennent à la même bobine ou pas.
Si vous identifiez une bobine, car les deux fils font sonner le testeur de continuité appelez la B ou A cela n’a pas d’importante, si vous l’appelez arbitrairement, A l’autre s’appellera B.
Maintenant que l’une des bobines a été nommée A lequel fil de la bobine est A+ lequel est A — ? cela n’a pas beaucoup d’importance non plus, si les fils sont inversés le moteur tournera à l’envers.
Pour faire tourner un moteur pas à pas dans l’autre sens, il faut inverser le branchement des fils d’une seule bobine, ou changer un paramètre dans l’électronique de commande pour faire une inversion logicielle.
Vous saurez si le moteur tourne à l’endroit ou à l’envers quand vous ferez vos premiers tests de déplacement des axes de la machine.