Interpolateurs
I ) Travail de la carte électronique interpolateur
L’utilisateur après avoir préparé un fichier Gcode ( séquence de déplacements de l’outil ) grâce à un ordinateur va l’envoyer vers l’électronique de commande. Cette électronique de commande est constituée par ce qu’on appelle une carte d’interpolation ou un interpolateur.
Le travail de l’interpolateur est d’interpréter les commandes Gcode pour envoyer le bon nombre d’impulsions vers les moteurs des axes de déplacement.
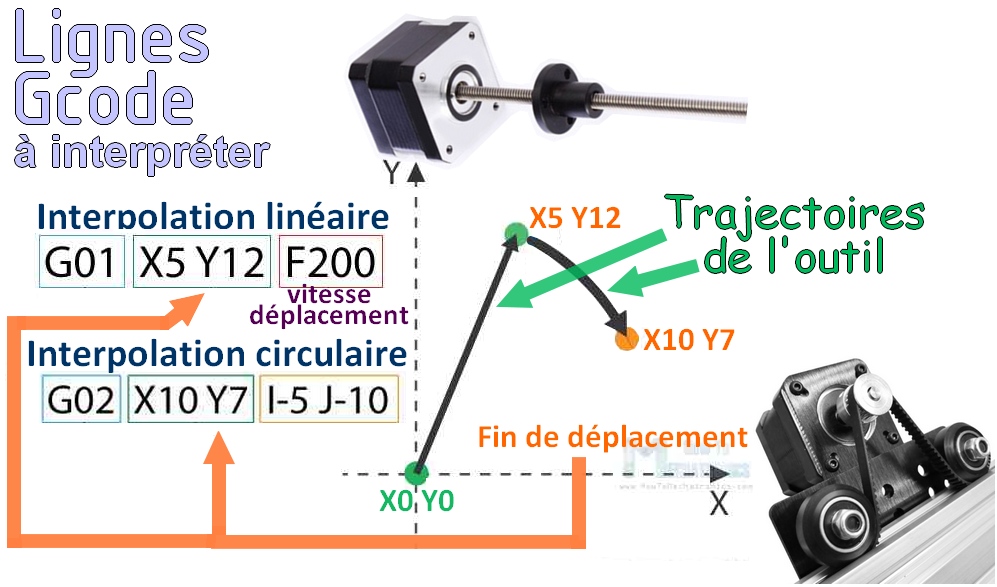
Dans le langage Gcode seuls les points de départ et d’arrivée sont indiqués donc l’interpolateur va devoir :
1 ) calculer tous les points intermédiaires d’une trajectoire en forme de droite ou circulaire
2 ) calculer la proportion d’impulsions, donc de petits déplacements angulaires à envoyer au moteur X par rapport au moteur Y pour que la combinaison des deux déplacements provoque la trajectoire de l’outil
3 ) envoyer ces impulsions à une fréquence tenant compte de la vitesse de déplacement demandée ( F200 pour 200 mm/min dans notre exemple )
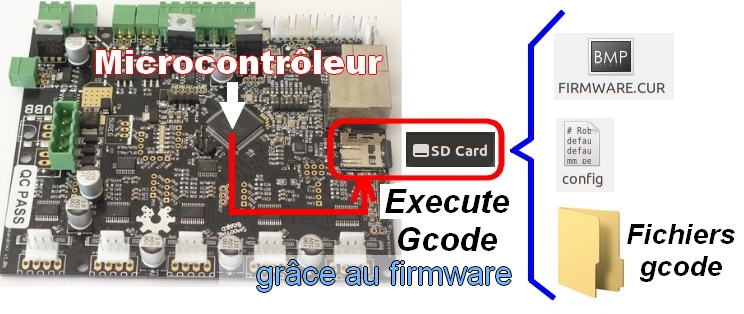
L’élément principal de l’interpolateur est le microcontrôleur, il interprète le langage Gcode grâce au firmware (micrologiciel) de la carte.
C’est pour cela que dans les documentations techniques d’une carte interpolateur on met en avant la puissance de son microcontrôleur, 32 bit, 200 MHz par exemple.
C’est pour cela que dans les documentations techniques d’une carte interpolateur on met en avant la puissance de son microcontrôleur, 32 bit, 200 MHz par exemple.