[:fr]
Répartition électronique de commande électronique de puissance
Le microcontrôleur de l’électronique de commande génère les impulsions pour les moteurs pas à pas en fonction des informations Gcode.
Les 4 bobines des moteurs pas à pas doivent être alimentées avec une tension et un ampérage suffisant pour que ces moteurs aient suffisamment de couple et de vitesse.
Dans le cas du contrôleur CNC Smoothieboard.
Si le couple des moteurs et leurs accélérations ne demande pas plus de 2A et 24V, le contrôleur CNC smoothieboard peut se charger de générer les impulsions et aussi d’alimenter les bobines des moteurs pas à pas avec des drivers internes.
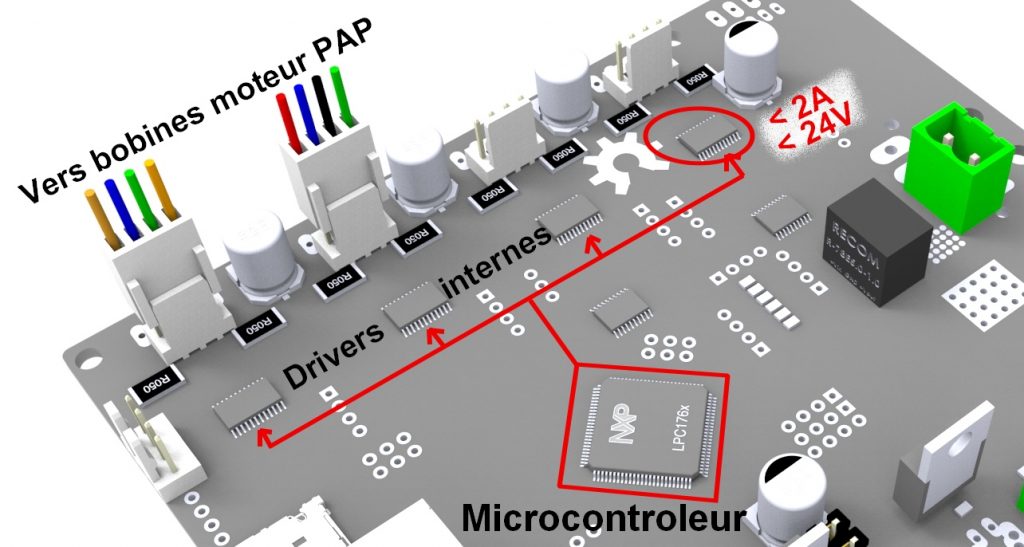
Dans le cas de drivers internes
Le microcontrôleur envoie des impulsions vers chaque drivers interne de chaque axe.
Ensuite, les drivers internes alimentent les bonnes bobines des moteurs dans le bon ordre.
Mise en place de drivers externes
Lorsque le couple et l’accélération des moteurs pas exige plus de 2A et 24V
Il est possible d’ajouter entre l’électronique de commande et les moteurs pas à pas des drivers externes.
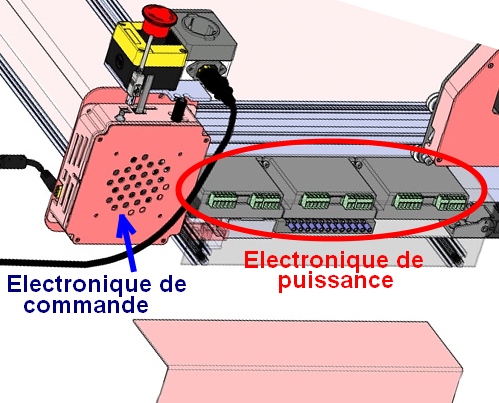
Les drivers externes font partie de l’électronique de puissance.
Ils fournissent une puissance électrique en fonctions d’information venant de l’électronique de commande.

Exemple de drivers externes
Les drivers externes reçoivent les impulsions avec l’entrée « EN »
L’entrées « DIR » pilotent le sens de rotation des moteurs
Une entrée « EN » permet de désactiver l’alimentation des moteurs.
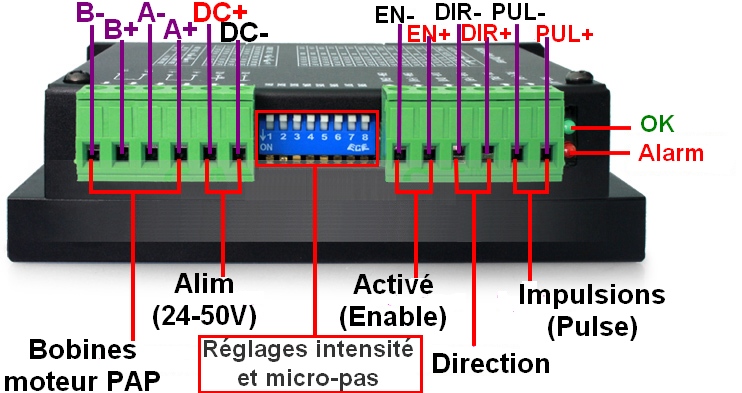
Les sorties A- A+ B+ B- alimentent les bobines des moteurs PAP et l’ensemble est alimenté en courant continu avec un voltage pouvant aller de 12 à 50V selon les modèles de drivers.
Des micro interrupteurs permettent de sélectionner l’intensité limite pouvant traverser les bobines des moteurs ainsi que de sélectionner les fractions de pas ( 1/8 ; 1/16 ; 1/32 … )
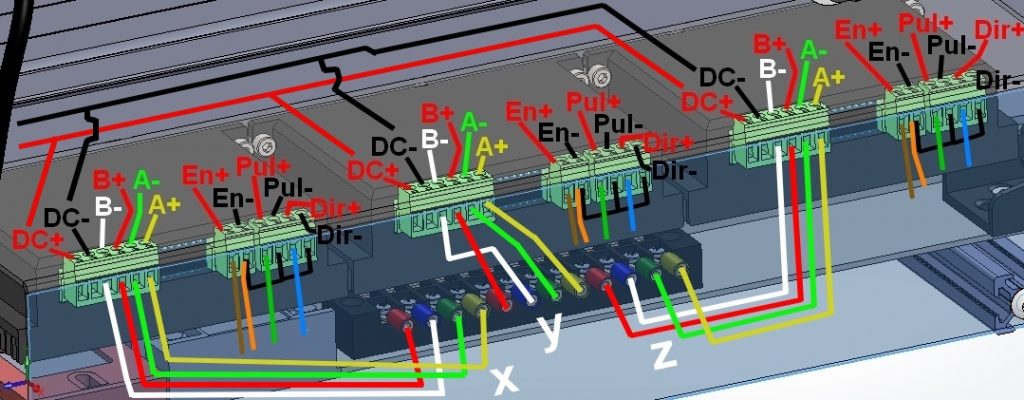
Câblage smoothieboard vers drivers externes
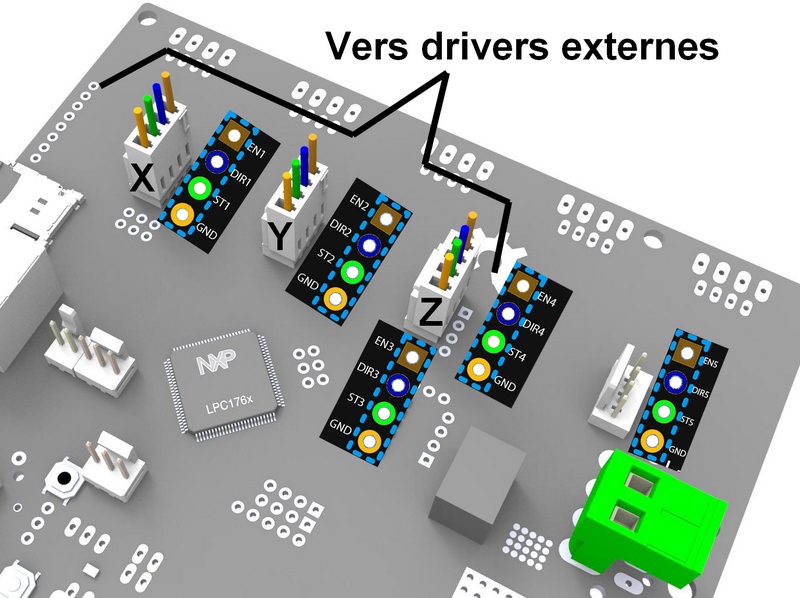
Les drivers externes sont branchés aux endroits noté EN, DIR, ST et GND de la smoothieboard.
ST signifie STEP (pas) c’est la même chose que PULL ( impulsion )
En standard les trois premiers connecteurs sont à connecter pour les axes X Y et Z
Par la suite vous pourrez câbler deux autres axes supplémentaire pour avoir une CNC 4 axes voir 5 axes.
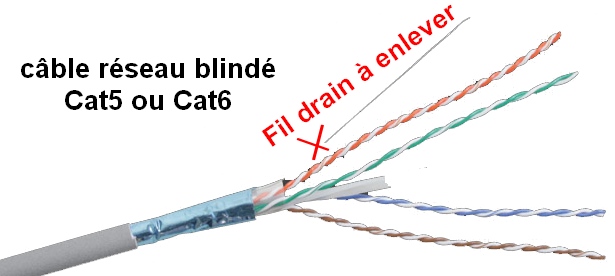
Du câble réseau blindé convient très bien pour relier la carte smoothieboard aux drivers externes.
Le fil de drain n’est pas nécessaire, il peut être enlevé.
Dans ce cas les paires de câbles torsadés peuvent être branchées ensemble à chaque broche des connecteurs molex.
– Câbles marrons vers EN (enable )
– Câble bleues vers DIR ( direction )
– Câbles verts vers ST ( Step signal )
– Câbles orange vers GND ( Ground )
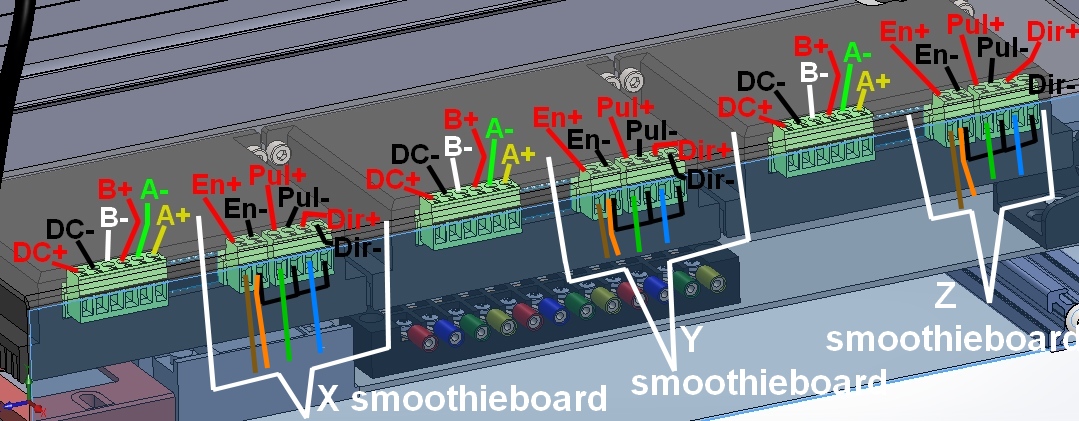
Les potentiels négatifs (Gnd) des entrée En, Pul et Dir peuvent être reliés ensemble au fil orange pour aller ensuite vers le GND de la smoothieboard.
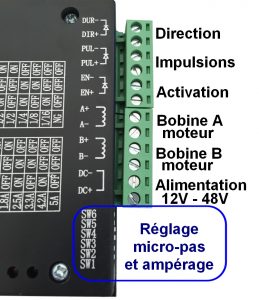
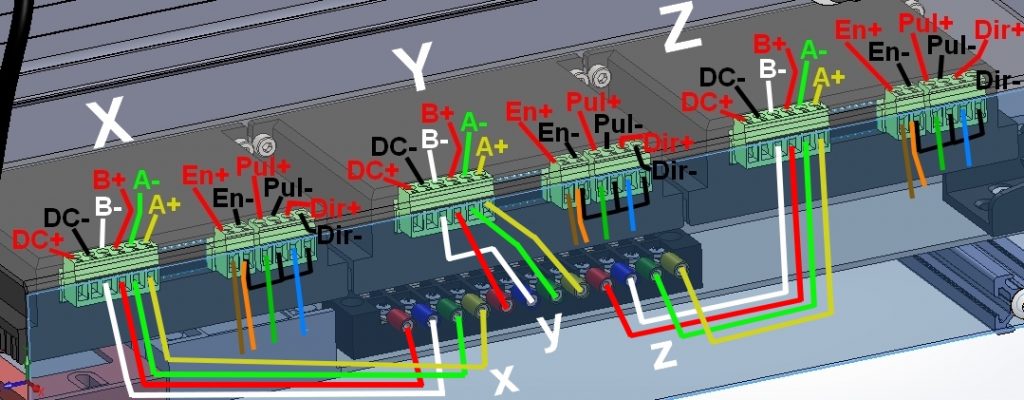
Câblage drivers externes vers bornier moteurs PAP
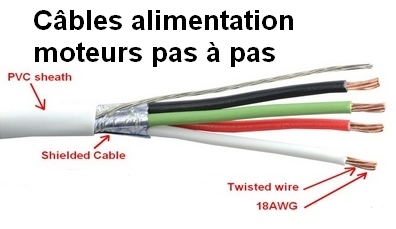
Vous pouvez pour effectuer ce câblage utiliser des câbles spécifiques pour moteurs Pas à Pas comme celui de l’image ci-contre.
Ou bien utiliser des câbles réseau blindés comme précédemment.
Chaque brin de câble réseau peut supporter jusqu’à 3.5A
Comme il y a 8 fils à l’intérieur vous pouvez relier ensemble les brins des 4 paires et avoir au total 4 fils d’alimentation pouvant supporter jusqu’a 7A.
Câblage de l’alimentation des drivers externes
Les entrées d’alimentation DC- de chaque drivers devront être connectées ensemble et relié à la borne – de l’alimentation.
Les entrées DC+ de chaques drivers devront aussi être connectées mais par l’intermédiaire de l’arrêt d’urgence de façon à ce qu’en cas d’arrêt d’urgence l’alimentation des drivers se coupe en plus de celle de la carte électronique.